

-100x52fill.jpg)




































- موجودی: موجود است
- تولیدکننده: MAKER BASE
- کد محصول: 10104213
- وزن بسته بندی: 0.15kg
برد کنترلر Makerbase MKS Robin Nano V3 همراه با نمایشگر رنگی و لمسی MKS TS35
ورژن 3.1
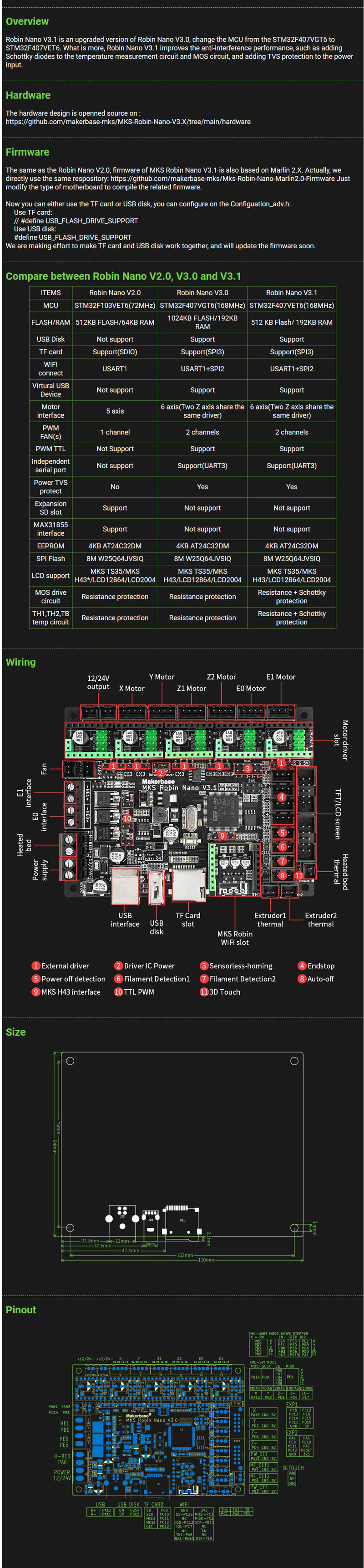
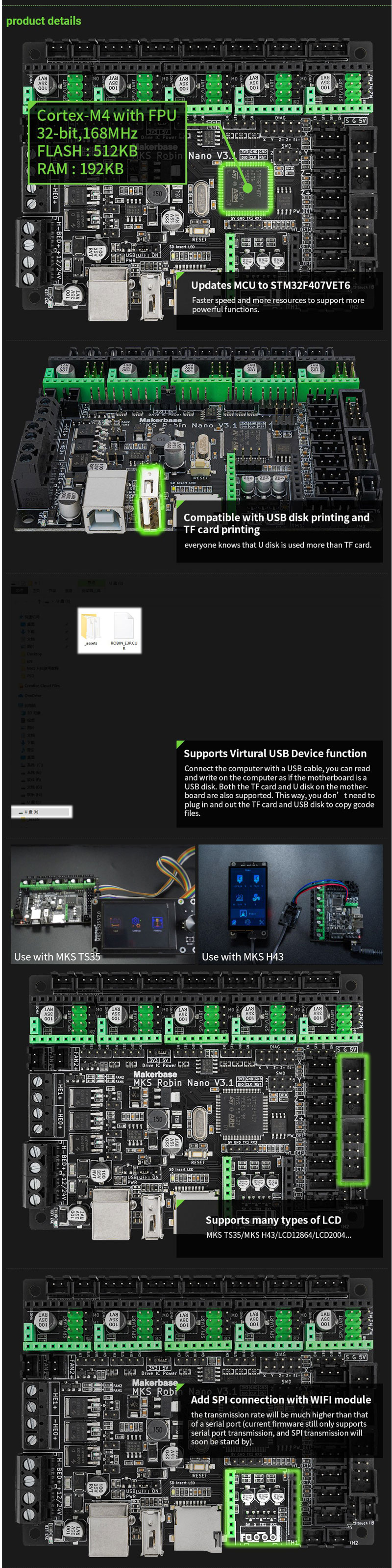
جدیدترین برد شرکت میکربیس تحت نام رابین نانو نسخه 3 (MKS Robin Nano V3) است که یک برد ارتقا یافته نسبت به نسل قبل یعنی نانو نسخه 2 می باشد.
با پشتیبانی از تمام قابلیت های پرینتر سه بعدی، این برد انتخابی بدون اما و اگر برای ساخت برترین پرینتر سه بعدی مد نظر شماست.
همراه این محصول یک نمایشگر رنگی و لمسی تحت نام MKS TS35 عرضه می شود که این محصول را انتخابی جذاب در این بازه قیمتی می نماید.
MKS Eagle detailed introduction:
راهنمای پروگرام کردن:
برای تغییر تنظیمات مارلین در بردی مثل MKS Robin Nano V3.x، شما نمیتوانید مستقیماً فایلهای با فرمت .bin را ویرایش کنید، چون این فایلها قبلاً "کامپایل" شده و به زبان ماشین تبدیل شدهاند.
برای شخصیسازی تنظیمات (مثل تغییر ابعاد پرینتر، نوع سنسورها، یا استپ موتورها)، باید مراحل زیر را دنبال کنید:
۱. دریافت سورس کد (Source Code)
به جای دانلود فایلهای .bin از بخش Releases، باید کل مخزن (Repository) مارلین مربوط به MKS را دانلود کنید.
در صفحه گیتهاب، دکمه سبز رنگ Code را بزنید و Download ZIP را انتخاب کنید.
فایل را از حالت فشرده خارج کنید. سورس کد شامل صدها فایل با پسوند
.hو.cppاست.
۲. ابزار مورد نیاز: VS Code و PlatformIO
برای ویرایش و تبدیل این کدها به فایل .bin قابل استفاده، به ابزارهای زیر نیاز دارید:
نصب نرمافزار Visual Studio Code (VS Code).
نصب افزونه PlatformIO IDE از داخل بخش Extensions در VS Code.
نصب افزونه Marlin Auto Build (اختیاری اما بسیار کمککننده).
۳. ویرایش فایلهای اصلی (Configuration)
وارد پوشه Marlin شوید. دو فایل حیاتی در اینجا وجود دارد که باید طبق سختافزار خود تغییر دهید:
Configuration.h: تنظیمات اصلی مثل نوع برد (
BOARD_MKS_ROBIN_NANO_V3), نوع نمایشگر، استپ موتورها و جهت حرکت محورها.Configuration_adv.h: تنظیمات پیشرفتهتر مثل قابلیتهای خاص TMC Drivers یا تنظیمات Dual Z.
۴. تنظیم محیط کامپایل (platformio.ini)
در فایل اصلی پروژه (platformio.ini)، باید مقدار default_envs را پیدا کنید و آن را متناسب با پردازنده برد خود قرار دهید. برای سری Robin Nano V3 معمولاً از این مقدار استفاده میشود: default_envs = mks_robin_nano_v3
۵. کامپایل و ساخت فایل BIN
پس از اعمال تغییرات:
در محیط VS Code، آیکون مورچه (PlatformIO) را از سمت چپ انتخاب کنید.
گزینه Build را بزنید.
اگر کدها بدون خطا باشند، در انتهای کار یک فایل جدید به نام
Robin_nano_v3.binدر پوشه مخفی.pio/build/mks_robin_nano_v3/ساخته میشود.
نحوه نصب روی برد
فایل ساخته شده (
.bin) را به همراه پوشه assets (که در پیام قبلی توضیح دادم) در ریشه یک کارت حافظه MicroSD کپی کنید.کارت حافظه را در حالی که برد خاموش است داخل آن قرار دهید.
برد را روشن کنید. پروسه آپدیت خودکار شروع شده و پس از چند ثانیه رابط کاربری جدید نمایش داده میشود.
































")
")